基于多模态超深度学习识别定位的多轴机器人控制系统
项目:基于多模态超深度学习识别定位的多轴机器人控制系统
单位:泉州装备制造研究所
推荐:泉州市总工会
项目介绍:
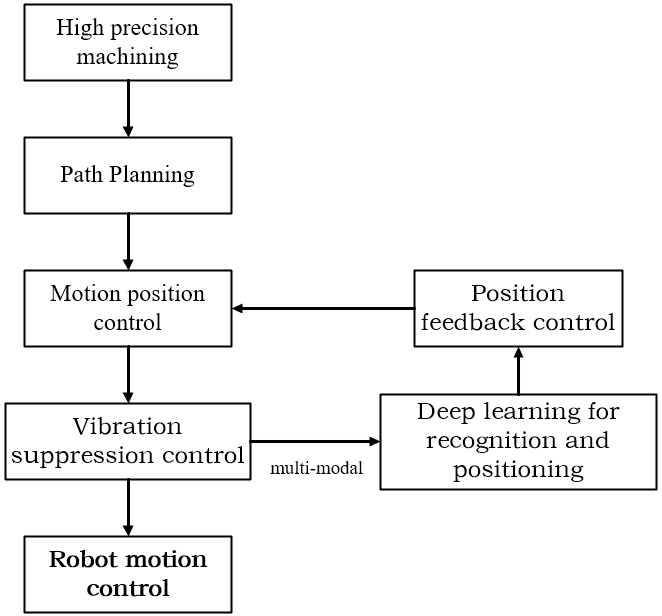
随着经济社会的发展,人们对产品的质量追求越来越高,然而由于硬件的限制,在一些行业难以做到高精度的加工,如人体骨骼缺损修复等。为了针对性提高产品质量,目前主要解决方法是购置高精度的加工设备,但价格昂贵,适用性单一,难以满足实际需求,尤其无法实现高质量活性骨缺失修复。因此,面对国家重大需求,联合第三军医大学等国内数十家重点科研单位,共同首创基于多模态超深度学习识别定位的多轴机器人控制系统。该系统通过超深度机器学习算法,实现对目标的高精度识别定位,利用总线分时复用方法,高速反馈调节信息,提高机器人平面控制精度(≦200μm)和层间控制精度(≦2μm),突破了高精度反馈控制关键技术的难题,可针对应用多种场景和个性化定制使用,具有高效性和普适性。目前,相关发明技术已应用多个领域,如义齿,个性化假体,焊接,磨抛以及制鞋等行业,其形成的产线,每线可节约人工4-6人,为企业节约成本1000万¥以上。其中,该系统定制生产的个性化假体已经应用于山东威高医疗器械有限公司,并在第三军医大学完成了16例以上具有生物相融性表面材料的人工关节植入手术,术后病人反应良好,相关技术成果荣获第二十五届中国发明展览会发明创业项目银奖,被中央电视台CCTV-6和CCTV-9多次专题报道,产生了巨大社会效益。
1、一种基于多轴联动控制和机器视觉测量的3D打印系统
2、一种基于姿态控制的鞋底喷胶路径的规划方法
3、一种基于机器视觉的3D打印喷嘴检测方法
附件下载


